






 2158 / 2894
2158 / 2894

2158
Anestesia por subespecialidades en el adulto
IV
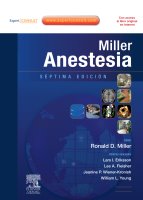
Figura 66-3
A,
La consola del sistema de telemanipulación robótica ZEUS consta de un monitor de vídeo y dos palancas de instrumentación que traducen
los movimientos de la mano del cirujano a una señal eléctrica que mueve los instrumentos robóticos.
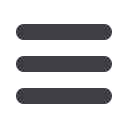
B,
Dos brazos AESOP montados en la mesa sostienen los
instrumentos y un tercero controla la cámara.
(Por cortesía de Computer Motion, Inc, Sunnyvale, CA.)
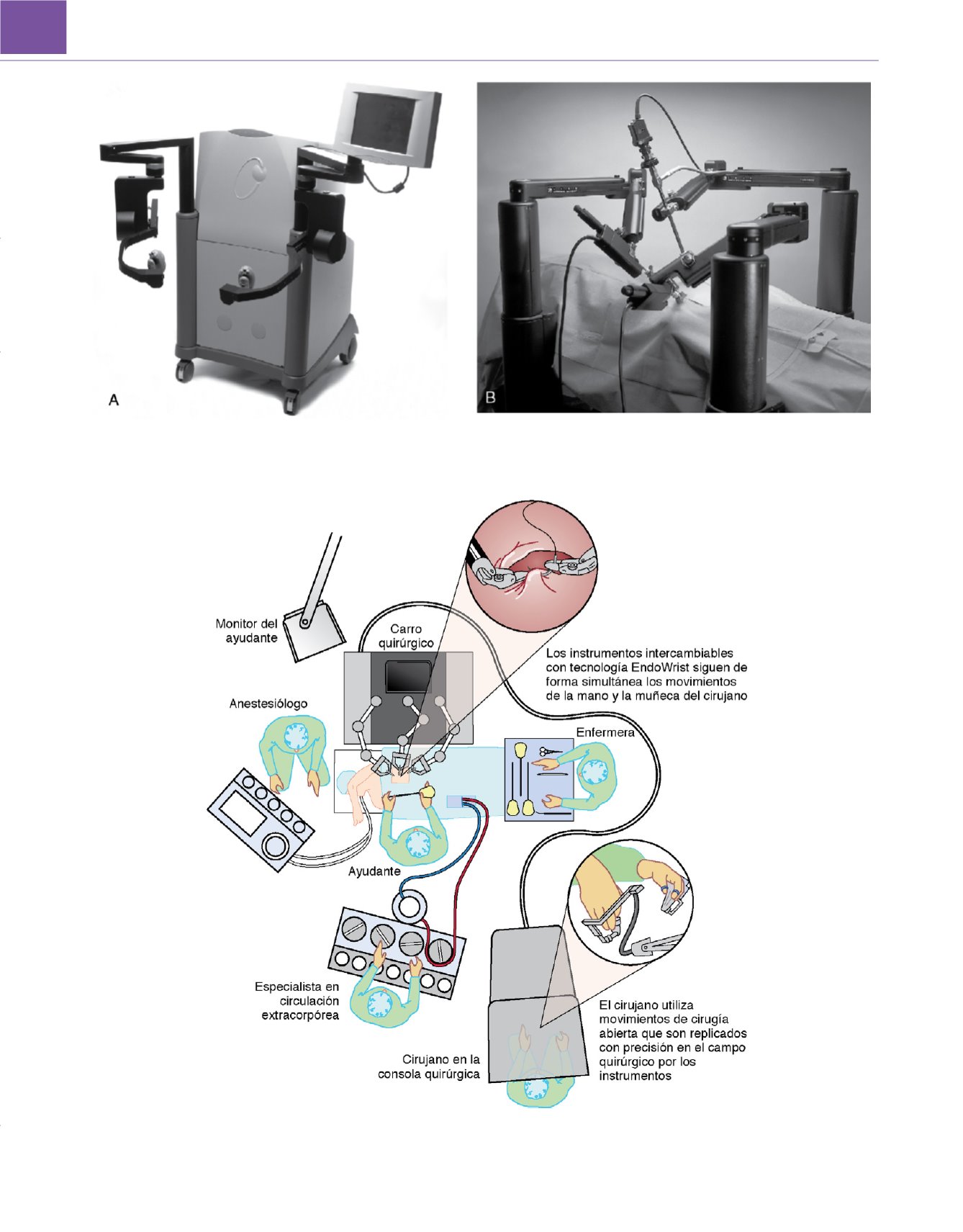
Figura 66-4
Esquema de un quirófano en el que se utiliza un sistema de cirugía robótica para una intervención cardíaca. (
Por cortesía de Intuitive Surgical, Inc,
Sunnyvale, CA.)