






 2160 / 2894
2160 / 2894

2160
Anestesia por subespecialidades en el adulto
IV
carro lateral. Y lo que es más importante, una vez que los instru-
mentos se conectan a los brazos del robot y están en el interior del
paciente, la posición de su cuerpo no puede modificarse hasta que
los instrumentos se desconecten del todo y se extraigan de la
cavidad corporal. Cualquier movimiento del paciente debido a
la falta de relajante muscular puede ser desastroso. Los botones de
embrague permiten posicionar los brazos robóticos de forma
aproximada sin mover los instrumentos de los trocares o de las
puertas de acceso. La función de embrague permite a los ayudantes
quirúrgicos intercambiar varios instrumentos.
La torre óptica contiene el equipamiento informático reque-
rido para integrar los canales ópticos izquierdo y derecho que
proporcionan la visión estereoscópica y para el funcionamiento del
programa necesario para controlar la cinemática de los brazos
robóticos. El ordenador comunica el movimiento traducido desde
las manos del cirujano a un código digital que mueve palancas,
motores y cables mecánicos. Éstos permiten al robot articular los
movimientos exactos de la mano del cirujano.
Los instrumentos deben permanecer estériles en la cavidad
corporal, aunque se comuniquen con brazos robóticos no estériles.
Esta comunicación se facilita con instrumentos extraíbles desecha-
bles. Cada tipo de instrumento requiere diferentes fuerzas y escalas
de los movimientos, intrínsecas a la tarea realizada, y un procesa-
miento específico del programa informático. Se precisa personal
adicional de quirófano para extraer e intercambiar los instrumen-
tos para las tareas específicas a lo largo de la intervención. Los
monitores se colocan en lo alto de la torre para que todas las per-
sonas del quirófano tengan una visión del campo quirúrgico.
Un obstáculo que aún debe investigarse es la sensibilidad
táctil. La retroalimentación que el robot ofrece de la fuerza aplicada
por el cirujano es inferior. El robot proporciona cierta sensibilidad,
pero la fuerza ejercida no se correlaciona bien con la que se aplica
a los tejidos. Esta correlación varía con el tipo de instrumento y
depende de la torsión aplicada, por lo que el cirujano debe confiar
en las indicaciones visuales de la deformación tisular para estimar
cuánta presión se está generando.
El sistema quirúrgico ZEUS es otro ejemplo de telemanipu-
lador maestro-esclavo. Utiliza la ayuda del sistema robótico AESOP
para la visualización. Es, en esencia, un brazo mecánico utilizado
por el médico para posicionar el endoscopio, que es una cámara
quirúrgica insertada en el paciente. Los pedales o un programa
informático activado por voz permiten que el médico coloque la
cámara y dejan sus manos libres para seguir la intervención en el
paciente. Los manipuladores del sistema ZEUS se montan con
facilidad en la mesa del quirófano, de forma muy parecida al
AESOP. El sistema proporciona un filtro de temblor y de movi-
miento a una escala de 2:1 a 10:1.
Cirugía general
La tecnología robótica se ha impuesto por sí misma en el campo
de la cirugía laparoscópica gastrointestina
l 11 .La primera operación
que utilizó telemanipulación robótica fue una colecistectomía lapa-
roscópica realizada en 1997 en Bruselas (Bélgica
) 12 .Las técnicas
quirúrgicas asistidas por robot permiten al cirujano realizar las
incisiones más pequeñas posibles y el mínimo estrés quirúrgico.
Esta tecnología posibilita que el cirujano trabaje a una escala muy
pequeña en espacios estrechos. Casi todos los procedimientos
digestivos se han realizado con seguridad por los cirujanos utili-
zando esta tecnología. Los más frecuentes son la colecistectomía,
la fundoplicatura, la miotomía de Heller, la cirugía bariátrica y la
colectomí
a 13 .La cirugía robótica permite superar alguno de los inconve-
nientes de los procedimientos laparoscópicos convencionales con
la imagen tridimensional, la eliminación de la inversión de los
movimientos, el escalado del movimiento y el filtrado del temblor
de reposo, a la vez que se permite una posición ergonómica y
cómoda. Otras ventajas descritas de la cirugía laparoscópica robó-
tica son una curva de aprendizaje cort
a 14 ,una mejor calidad de la
reparació
n 15y la facilidad a la hora de operar a pacientes con obe-
sidad mórbida porque los instrumentos rígidos ayudan a contra-
rrestar la fuerza de torsión de la pared abdomina
l 16. La cirugía
laparoscópica robótica también se asocia a una elevada satisfacción
del pacient
e 17. Debido a que no se dispone de datos sobre el pro-
nóstico de la cirugía robótica laparoscópica, sus mayores costes
pueden ser un elemento disuasorio para algunos programas qui
rúrgicos.
Aspectos anestésicos
En el quirófano, el paciente se monitoriza con electrocardiograma,
pulsioximetría, sonda de temperatura axilar y manguito de presión
arterial no invasiva. Se debe contar con accesos venosos periféricos
bilaterales, pues la extremidad superior izquierda no está accesible
con facilidad durante la cirugía. La anestesia se puede mantener con
un fármaco volátil. La relajación muscular es fundamental, para
evitar cualquier movimiento del paciente mientras los instrumen-
tos quirúrgicos están en el interior de la cavidad abdominal. Deben
insertarse sondas orogástrica y urinaria. Siempre que sea posible,
se utilizarán calentadores corporales por convección de aire.
Una vez que el paciente se coloca en decúbito supino, se
prepara de forma estéril y se cubre con paños, tras lo que la cavidad
abdominal se insufla con dióxido de carbono (CO
2
) hasta una
presión inferior a 20 mmHg. El trocar para la cámara se coloca de
forma manual. Las incisiones para los puertos de la fundoplicatura
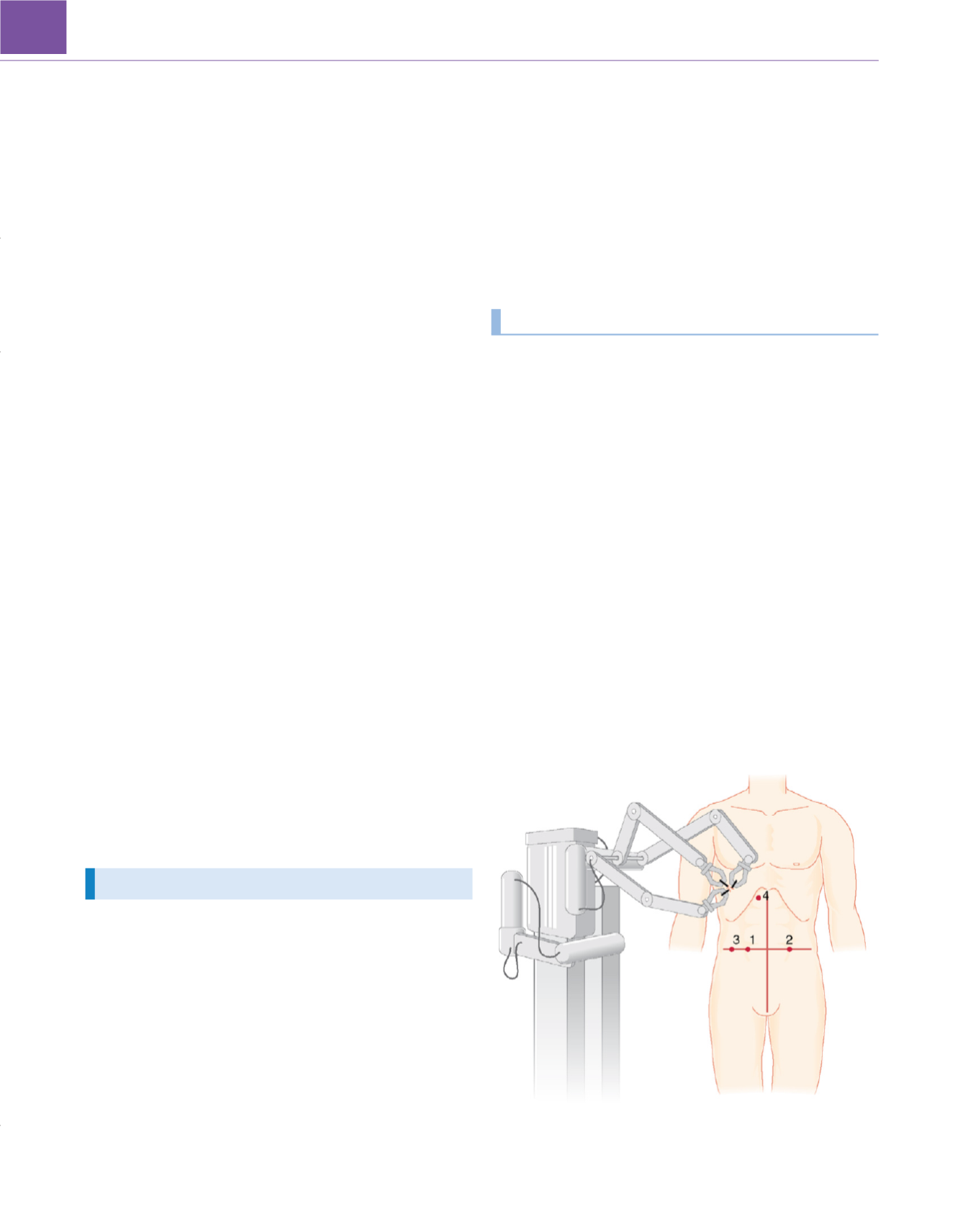
de Nissen y la colecistectomía se muestran en las
figuras 66-8 y 66-9 .El carro lateral del robot se sitúa muy cerca de la cabeza del
paciente para conectar los otros trocares mediante guía visual con
la cámara del robot. Debido a la proximidad del carro lateral a la
cabeza del paciente, el acceso a su vía respiratoria, el cuello y
la cabeza es muy limitado. La cabeza se debe proteger frente a una
colisión involuntaria con los brazos robóticos cuando éstos se
mueva
n 18,19. Una vez que el robot está conectado, la posición del
paciente no puede cambiarse. El equipo quirúrgico debería ser
Figura 66-8
Puntos de incisión numerados para la fundoplicatura de Nissen
y localización de los brazos robóticos.